



0
TECNOLOGIA e ARTE NAVALE
La curva di evoluzione ed il bilanciamento
a cura dei del Primi Ufficiali Capitani di Lungo Corso
Paolo Ansaldi – Fabio Tortora
Premessa. La relazione è nata da una segnalazione del CLC Paolo Ansaldi (Istruttore nel Centro olandese di addestramento degli Ufficiali delle Marine mercantili) il quale inviò all’Autore una particolare tabella compilata con i tre elementi del moto circolare: velocità della nave, raggio di girazione, velocità angolare r.o.t. indicata anche con W (Rate of Turn r.o.t). Il r.o.t. , in generale, è l’elemento cercato nella curva di evoluzione, in funzione della velocità V della nave e del raggio di evoluzione R:
V = W∙R r.o.t. : W = V / R R = V / W
Una nave in evoluzione, per effetto della forza centrifuga, sbanda di qualche grado verso l’esterno della curva. Se le circostanze lo permettono, è opportuno bilanciare lo sbandamento.
Argomentazioni interessanti: importante connessione tra l’accostata ed il bilanciamento.
Il Capitano CLC Fabio Tortora (Primo Ufficiale sulle navi passeggeri della società Carnival), nel solco già tracciato, ha argomentato introducendo ulteriori considerazioni.
L’autore si è limitato a esporre qualche annotazione teorica.
Ai due Ufficiali CLC Paolo Ansaldi e Fabio Tortora va il ringraziamento dell’autore e di Quaderni Marinari.
- Architettura Navale. La nave vista dagli Ingegneri navali
- Le Prove in mare
- Parametri della curva di evoluzione
- Relazione tra V’ R e ROT (W)
- Tabella e sua interpretazione
- La guardia col l° Ufficiale (F.T.)
- Bilanciamento
- Comandanti e le manovre
- Le tecniche delle navi portacontenitori.
-
Architettura Navale. La nave vista dagli Ingegneri navali.
Alcune tecniche della navigazione marittima hanno subito, negli ultimi cinquant’anni, notevoli cambiamenti, effetti dal progresso della tecnologia nel campo della ingegneria navale.
Il contatto casuale con Ingegneri del CETENA ha stimolato l’interesse su talune tematiche che verranno considerate, sia pure sommariamente, nelle note che seguono.
Consideriamo la curva di evoluzione della nave: le occasioni sono: quando la nave è manovrata per attraversare uno stretto o quando effettua un’ampia accostata per evitare il rischio di collisione con altra nave, nell’inversione di rotta in attesa di ricevere il pilota per entrare in porto; quando la nave entra in uno schema di separazione del traffico ed incontra una rotonda (rotatoria)…
Saranno esaminati alcuni aspetti nuovi che si aggiungono a quelli già trattati nei paragrafi del capitolo X del libro di Navigazione Moderna.
È opportuno dare inizialmente uno “sguardo” panoramico alle problematiche legate ai progressi della tecnologia nel campo della ingegneria navale.
Dopo gli studi sul profilo della nave, delle resistenze in acqua, delle qualità nautiche, eccetera, viene costruito il modello bave, oggetto di rilievi empirici sulla grande vasca di sperimentazione.
I modelli di similitudine meccanica, i nodelli matematici, programmi e componentistica (software e hardware compatibili) completano il primo ciclo di studi teorici e delle prime prove sperimentali.
Seguono l’allestimento e le prove in mare.
-
Le Prove in mare.
Concludono l’ultima fase di allestimento di una nave nuova (o di una nave che abbia subìto rilevanti trasformazioni). Nelle prove in mare, eseguite con dislocamenti corrispondenti al servizio più usuale della nave, sono registrati, grazie ai numerosi sensori variamente dislocati in vari punti della nave, i parametri delle curve di evoluzione effettuate con due velocità (ad esempio 12 e 20 nodi) e con due angoli di timone (ad esempio 10° e 30°). I dati registrati sono poi esaminati ed elaborati dai tecnici e da ingegneri navali. Dopo lo studio si disegnano i grafici e si compilano tabelle di “quella data” nave; concorrono anche i valori interpolati ed estrapolati tra le due coppie di velocità ed angoli di timone considerati, che otremmo chiamare le ‟coordinate dinamiche” della nave. Al termine si arriva a disegnare le curve di evoluzione (corved tracks).
3) Parametri della curva di evoluzione.
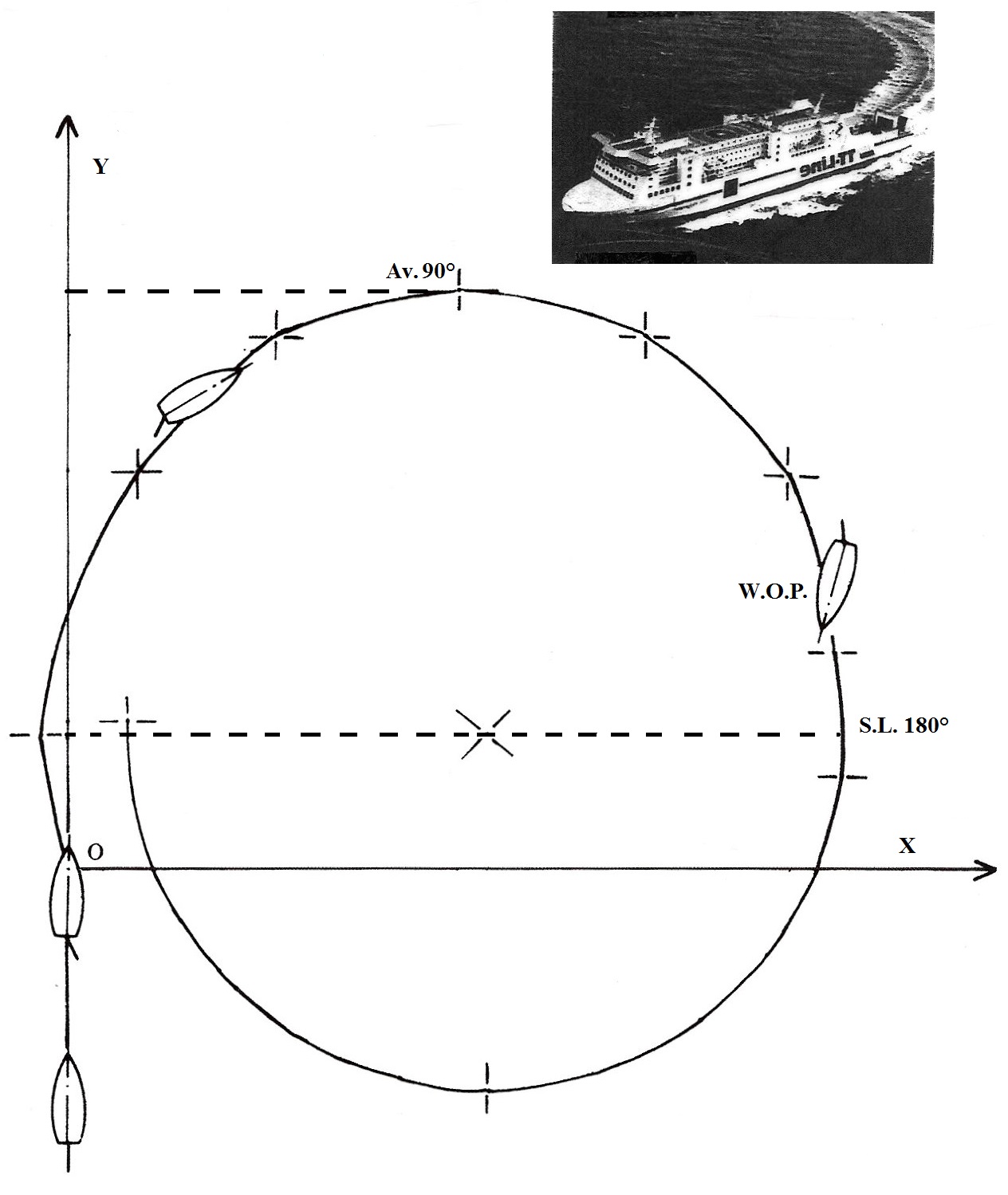
Il primo punto della curva di evoluzione è quello in cui si mette il timone alla banda (Wheel over point – WOP); gli altri due punti caratterizzanti e fondamentali sono: avanzo 90° e spostamento laterale 180°, espressi in metri. Inoltre viene individuato l’angolo di massima inclinazione della nave (comunque evidenziato dall’inclinometro durante l’evoluzione).
Nel punto di timone (W.O.P.) la nave, con velocità iniziale V, entra nella prima fase evolutiva: fase transitoria di girazione; essa termina quando l’angolo di prora è cambiato di 40 – 45 gradi.
Oltre tale valore la nave entra nella fase che può ritenersi, con accettabile approssimazione, fase di regime rotatorio (anche se la fase della curva molto prossima alla circonferenza arriva dopo li punto di spostamento laterale ‟S.L. 180°”).
Superati i 45° di accostata, viene rilevata la velocità lineare V’, il cui vettore (tangente alla curva) è minore della velocità iniziale V a causa della resistenza opposta dalla pala immersa del timone alla banda. Con il valore di V’ viene calcolata la velocità angolare media di evoluzione (R.O.T. Rate of Turn). Un valore medio di riduzione Δv è valutato intorno all’un per cento della velocità V per ogni grado di timone “t” alla banda.
Riterremo che le due curve, oraria e antioraria, per timone a dritta e a sinistra, siano praticamente uguali alla loro curva media.
Velocità di girazione. La velocità di girazione è la velocità angolare media W (R.O.T.) durante la fase rotatoria. V = W ∙ R ; W = V / R ; R = V / W
La figura mostra l’inversione di rotta di una nave che da Rotta 000° passa a Rotta 180°. Il punto di timone alla banda è W.O.P (Wheel over point). Tra i punti evidenziati si notano i transiti sui punti: Av. 90° (Avanzo), S.l. 180° (Spostamento laterale).
Velocità lineare V’ lungo un arco di circonferenza, raggio R e velocità angolare di rotazione W denominata R.O.T. (Rate of turn), sono correlate tra loro da una formula della Dinamica (Fisica)m sopra riportata.
Prima di evidenziare la T.O.T. vediamo come si calcola la V’ di evoluzione quando sono noti:
V Velocità d’inizio evoluzione, la perdita percentuale di velocità Δv, per ogni grado di timone t° alla banda: V’ = V(1 – Δv.t° / 100)
I Esempio : V= 8,90 nodi Δv =1 ; t° = 10° La velocità V’ risulta 8,01 nodi.
Nota.
Elica destrorsa. Curva in acque profonde “P”: In acque poco profonde rispetto all’immersione I (P/I<3), la curva si allarga.
Curva ricavata dalla media dei valori delle evoluzioni in senso antiorario ed in senso orario. L’elica destrorsa, per l’effetto laterale delle pale, ha nella curva di evoluzione in senso orario, parametri (Avanzo 90, spostamento laterale 180 e “raggio” di evoluzione) lievemente maggiori rispetto a quelli della curva in senso antiorario. Pertanto: i valori che si riscontrano nella pratica della navigazione sono, in generale, lievemente differenti da quelli tabellati: maggiori se l’accostata avviene con timone a dritta; lievemente minori quando si effettua l’accostata con timone a sinistra; sempre per angolo di 20°.
Dati della curva di evoluzione
|
Tempi |
Accostata |
Distanza all’incrocio |
Trasferimento |
Avanzo (y) |
Spostamento laterale(x)
|
|
1m 30s 2m 45s 3m 56s 5m 05s 6m 35s 8m 54s |
ΔPv 30° 45° 60° 75° 90° 105° 120° 135° 150° 165° 180° 270° 360° |
Metri 250 300 365 430 510 615 760 980
|
Metri 120 165 210 265 340 440 580 800
|
Metri 350 415 470 500 510 500 470 415 350 270 190 |
Metri 60 120 180 255 340 425 505 570 630 660 670
|
Nota. I punti, in pratica, sono più numerosi di quelli elencati.
Tabella riassuntiva dei Parametri (valori medi) di una nave di Dislocamento 5090 Tonn.
Lunghezza nave L= 91 mVelocità iniziale 12 n. (6,17 m/s)Angolo timone α 20°Δv 0,01
Avanzo 90°: 510 m (5,6·L) Spostamento Laterale 180°: 670m (7,4·L)
“Raggio” R 335 m (3,7·L) R.O.T. 39°/m
4) Relazione tra V’ R e ROT (W):
W= V’ / R formula dei moti circolari uniformi.
Segnaleremo le formule “rapide” e le formule precise.
Si desidera avere una ROT espressa in gradi al minuto (°/min): V’ entra nella formula in nodi, R in miglia ;
Formule rapide Formule precise
R.O.T.°/mln=V’nodi ; R.O.T.°/min = (V’nodi / Rmiglia).0,95
Rmiglia
Rmiglia =(V’nodi /ROT° min) ; Rmiglia = (V’ nodi / ROT° min).0,95
V’nodi= Rmiglia . ROT°min ; V’nodi= Rmiglia . ROT°min.1,05
II Esempio (con formule precise):
Primo esercizio V ‘= 12 nodi, R = 3 miglia. Risultato: ROT 3,8° al minuto.
Secondo esercizio: V’ 6 nodi, raggio 3 miglia, ROT 1°,9 al min.
Questi risultati si trovano anche nella tabella (più avanti riportata) dove si entra con R (raggio, in inglese Radious, latino: Radius) argomento verticale, V’ in nodi (velocità tangenziale lungo la curva) è l’argomento orizzontale; nel corpo della tavola si legge il R.O.T. in gradi al minuto (°/min).
5) Tabella e sua interpretazione.
Si può notare, dall’esame della tabella, che la velocità angolare R.O.T. cresce col diminuire del raggio di curvatura, specialmente se e elevata la velocità V’ (e così dicasi per V ).
La tabella ha carattere generale, valida per tutte le navi.
Le considerazioni che seguono, pur interessando ogni nave, hanno maggiore importanza sulle navi passeggeri. Ogni accostata, con elevata velocità angolare (°/min) comporta uno sbandamento causato dalla forza centrifuga, sulla nave, diretta verso l’esterno dell’accostata.
I valori sbarrati della velocità angolare, maggiori o uguali a 30°/min, sono sconsigliati, specialmente per le grandi navi passeggeri. I valori sottolineati, da 19 a 29 gradi al minuto, sono accettabili purché la nave abbia dispositivi per ridurre lo sbandamento. Tali dispositivi consistono nel travaso di acqua (ad esempio acqua di lavanda) dalle tanche “esterne” (relativamente alla curva di evoluzione) alle tanche “interne”. Ciò al fine di ridurre lo sbandamento.
Viene riportato uno stralcio della tabella “Ansaldi”
Stralcio tabella Ansaldi delle velocità angolari R.O.T. in °/min
→
V’2 4 6 8 10 12 14 16 18 20
↓ R
.5 4 8 11 15 19 23 2731 34 38
1 2 4 6 8 10 11 13 15 17 19
21 2 3 4 5 6 7 8 9 10
31 1 2 3 3 4 4 5 6 7
4.5 1 1 2 2 3 4 4 4 5
Il lettore può verificare la risoluzione del primo e del secondo esercizio del II Esempio impiegando la tabella che dà, però, valori arrotondati al grado più vicino.
Nota: i valori elevati sottolineati e particolarmente quelli sbarrati
Sono teorici, cioè estranei alla pratica di bordo.
III Esempio: Raggio 1,50 miglia; V’ = 19 nodi;
Dalla tabella, ma più precisamente dal calcolo, si trae ROT = 12°.1 al minuto.
Calcolo della velocità V corrispondente a V’ 14 nodi ; si conosce Δv = 1,1 percentuale, timone t = 15°
Per evoluire con tale velocità la nave deve arrivare al punto di timone alla banda (Wheel over point WOP) con la velocità V di 16,8 nodi., valore ottenuto con la seguente formula risolutiva:
V= V’ / (1 – Δv∙t°/100)
IV Esempio. Raggio di evoluzione 1,5 miglia; velocità in evoluzione V’ 15 nodi. La tabella ed il calcolo forniscono il seguente R.O.T.: 9°,5 al minuto.
Problema inverso. La formula del ROT è risolvibile rispetto a R ed a V’.
Rmiglia = (V’ nodi / ROT° min).0,95 ;
V’nodi= Rmiglia . ROT°min.1,05
V Esempio: Dati V’ e ROT determinare R
VI Esempio; Dati R e ROT determnare V’
VII Esempio: Dati R e ROT determinare V’ , V con t° = 20°
V’ entra nella formula in nodi / 60 ; miglia al minuto)
R in miglia ;
57°,3 fattore del numeratore (1 radiante=180°/π)
R.O.T.°/mln=V’nodi.57,3 ; R.O.T.°/mln=V’nodi . 0,95
60.R miglia Rmiglia
0,95 è il valore del rapporto 57,3/60 con poco errore,
R.o.T.°/min = Vnodi/Rmiglia
Il radiante è l’ampiezza dell’angolo al centro α di un arco “l” di circonferenza lungo quanto il raggio r (l = α.r); quando l = r , α = 1 (α è sempre grandezza adimensionata). Tale angolo (α =1) risulta ampio 180° / π = 57°,29… ; dove π = 3,1415…
6) La guardia col I Ufficiale (Fabio Tortora).
La nave sta avvicinandosi al punto di manovra (un’ampia accostata).
Quando la nave è sul W.O. P. (Wheel Over Point) il sistema aggancia la nuova rotta, la traiettoria curvilinea, di cui ha i valori di tutti i parametri. Prospettiamo vari casi di manovra:
a) Un’ampia accostata al largo della costa, in mare aperto. La nave naviga col track Pilot inserito; appena transita sul punto programmato di accostata (Wheel over point), l’accostata avviene in maniera automatica e il sistema gestisce il timone in maniera tale da seguire la curva prestabilita: con il comando automatico go to track (v. §7 Capitolo IX Navigazione moderna) mantenendo invariati i parametri impostati. Il sistema di automazione definisce il canale di navigazione curvilineo. Quando la nave esce dal canale suona l’allarme…
b) In ogni caso, prima dell’accostata, i parametri della navigazione inseriti nel sistema integrato Track Pilot possono o devono essere cambiati quando mutano le condizioni di navigazione. I dati d’ingresso –input- soggetti a cambiamenti sono: rotta, velocità V della nave (speed), raggio R di evoluzione, angolo di timone, R.O.T. (velocità angolare : rate of tirn).
c) la nave è in acque ristrette, prossima all’atterraggio. Si commuta il sistema sul Manuale; l’Ufficiale o il Comandante (nel caso in cui abbia già “preso” la nave -preso nel senso di essere direttamente responsabile della manovra-) ha un valido riferimento sullo schermo del radar e/o ECDIS (carta elettronica).
d) Un altro ausilio può essere il ‘prediction path’. Utilizzando questa funzione, sullo schermo appare una proiezione futura del moto della nave; quindi si riesce immediatamente a visualizzare e valutare se l’accostata è troppo rapida rispetto alla curva impostata: in tal caso è necessario togliere timone o addirittura scontrare; oppure se l’accostata è troppo lenta; in questo caso si ha la necessità di dare più timone.
e) L’indicatore R.O.T: “bussola” di riferimento.
In una manovra eseguita senza l’ausilio del sistema integrato di navigazione l’indicatore ROT può fornire una indicazione utile al timoniere (e all’Ufficiale che controlla l’evoluzione della nave durante l’accostata). Il valore del R.O.T. tratto dalla tabella è comunicato al timoniere.
Se, durante l’accostata, il ROT istantaneo, letto sull’indicatore, tende a diminuire rispetto al R.O.T. ordinato (quello della tabella) egli incrementa di qualche grado l’angolo di timone; viceversa, toglierà qualche grado di timone quando dovesse notare un incremento del ROT dell’indicatore.
7) Bilanciamento.
Entrambi i relatori affermano: nelle navi moderne si dispone di sistemi di bilanciamento (heeling system) che in alcuni casi possono essere anche automatici. A seconda della tipologia di nave si possono avere diversi sistemi; ad esempio sulle navi da carico il sistema di bilanciamento è utilizzato principalmente quando la nave è in porto durante le operazioni commerciali; mentre per le navi passeggeri è più utilizzato durante la navigazione: nelle accostate per evitare una nave in rotta di collisione, per seguire uno schema di separazione del traffico, in particolare le rotonde.
Svolgiamo un esempio numerico di bilanciamento:
Momento sbandante; p∙y∙cosα
Momento raddrizzante D ∙ (r – a) ∙ senα
Dall’equazione dei due momenti si perviene alla determinazione della quantità di acqua da travasare per pervenire al raddrizzamento:
p = [D (r – a) ∙ tangα] / y
Esempio: D = 50.000 tonn. ; ( r – a ) = 1,2 m.; y = 11 m ; α = 2,5° . Determinare p.
Risultato: p = 238 tonn.
Attenzione però al bilanciamento per contrastare lo sbandamento dovuto all’azione del vento: F. Tortora: “ho conosciuto un Comandante che non voleva assolutamente che si usasse il bilanciamento per compensare il momento sbandante causato dal vento, poiché nel caso di un’accostata improvvisa (ad esempio per evitare una nave in rotta di collisione) il vento potrebbe trovarsi dal lato opposto a quello della zavorra e pertanto causare, concordemente con l’azione della zavorra, un pericoloso sbandamento.
Il bilanciamento è sconsigliato, ad ogni nave, in condizioni meteo di vento teso, quando la nave deve effettuare un ampio cambiamento di rotta. Possono verificarsi le seguenti due situazioni:
-
la variabilità del vento;
-
il cambiamento di rotta che può comportare:
“viramento” di bordo in prua o in poppa; cioè
Il cambiamento di lato del vento con la probabilità di due effetti sbandanti contemporanei, con effetti concomitanti di sbandamento.
8) I Comandanti e le manovre.
Per quanto riguarda la curva evolutiva, direi (è F.T. che ‟parla”) che nella pratica di bordo oggi, così come in tante altre circostanze, i comandanti sono aiutati dalla tecnologia. Infatti i dati evolutivi sono inseriti nel sistema di navigazione integrata; in fase di programmazione del viaggio nel track pilot possono essere impostati diversi parametri, quali, ad esempio, la velocità V che s’intende mantenere, il rate of turn , il radius; questi parametri, combinati con il limite massimo di timone, producono un ramo della curva ad ogni wheel over point; relativo e vicino ad ogni way-point.
Il Comandante norvegese che abbiamo a bordo adesso utilizza molto questa funzione.
Il Comandante Luca Manzi, seppur più giovane del Comandante norvegese, preferisce affidarsi il più delle volte, alla sua esperienza e al suo spiccato sesto senso marinaro piuttosto che agli ausili elettronici. Col suo colpo d’occhio ed una valutazione d’insieme della manovra; ha una maestria che rievoca le doti e l’arte marinara e nautica dei Capitani di un tempo.
Ogni tanto viaggia con noi il Comandante della Compagnia per vedere come gli Ufficiali applicano le procedure e per dare alcuni suggerimenti. Sono occasioni per migliorare.
Nella navigazione in mare aperto, mantenendo il track pilot, l’accostata avviene in maniera automatica e il sistema gestisce il timone in maniera tale da seguire la curva prestabilita mantenendo i parametri impostati.
L’Ufficiale o il Comandante (nel caso in cui abbia già preso la nave, cioè assunto la diretta responsabilità della manovra) ha un valido riferimento sullo schermo del radar e/o ECDIS. Un altro ausilio può essere il ‘prediction path’; utilizzando questa funzione, sullo schermo appare una proiezione futura della nave e quindi si riesce immediatamente a visualizzare se l’accostata è troppo rapida rispetto alla curva impostata nel sistema integrato; in tal caso è necessario togliere timone o addirittura scontrare. Quando col prediction path’ si desume, invece, che l’accostata è troppo lenta, si ha la necessità di dare più timone.
9)Le tecniche di bilanciamento nelle navi portacontenitori e nelle passeggeri (Fabio Tortora).
Spesso si praticano tecniche di caricazione o scaricazione non uniformi. Ricordiamo che i piani di carico delle navi portacontenitori sono stilati a terra. Si verifica talvolta la disimmetria dei carichi destinati in porti differenti. A volte accade che le gru a ponte (meglio conosciute come ‟paceco”) possono operare più rapidamente; scaricando/caricando un’intera fila di contenitori. Alcune paceco moderne, nei porti più attrezzati, hanno sistemi automatici tali che, una volta scaricato o caricato il primo contenitore, ritornano automaticamente nella stessa posizione; pertanto non scaricano uno stesso ‛tiro’ di contenitori da lato a lato, bensì diversi tiri sulla stessa fila e sulla stessa baia.
Questo comporta, particolarmente nel momento in cui viene scaricata la fila più vicina alla murata, la creazione di un notevole momento sbandante (un container pieno da 40’ può pesare fino a 40 tonnellate); momento che deve essere compensato dal sistema di bilanciamento.
Alcune casse laterali vengono dedicate a questo scopo e vengono chiamate “casse di bilanciamento” (heeling tanks); praticamente si ha una coppia, o più coppie di casse laterali, aventi una zavorra permanente; le casse sono comunicanti tra loro con una pompa dedicata, “pompa di bilanciamento” o “heeling pump. Esempio: una coppia di casse, una a dritta e l’altra a sinistra, aventi una capacità massima di 100m3; in questo caso si mantengono a bordo 100m3 di zavorra che possono essere trasferiti da un lato all’altro.
Nei sistemi automatici, quando la nave è in porto durante le operazioni commerciali, si attiva il sistema dove sono stati precedentemente impostati il grado di sbandamento, superato il quale il sistema deve intervenire e quello in cui si deve fermare (ad esempio start +/- 0,5° – stop +/- 0,1°); quando la nave raggiunge uno sbandamento di 0,5° da un lato, automaticamente si aprono le valvole e la pompa trasferisce zavorra dal lato opposto fino a limitare lo sbandamento a 0,1°.
Nelle navi che dispongono di gru (a bordo), il sistema automatico non viene utilizzato quando le gru di bordo sono in uso in quanto si hanno continui sbandamenti derivanti dai movimenti delle gru stesse.
Se la nave è in navigazione, i comandi del sistema di bilanciamento vengono trasferiti dalla ‛sala carico’ al ponte di comando e il sistema automatico viene disinserito; in questo caso il bilanciamento viene utilizzato per compensare lo sbandamento dovuto al vento, oppure dall’accostata; ecco che, come anticipato, questo sistema viene utilizzato maggiormente sulle navi passeggeri. Quando ero un giovane Ufficiale sulle navi portacontainer, ho conosciuto un Comandante che non voleva assolutamente che si usasse il bilanciamento per compensare il momento sbandante causato dal vento perché, in caso di accostata improvvisa, il vento avrebbe potuto pervenire dall’altro bordo, opposto, e pertanto causare un pericoloso sbandamento (accentuato dalla zavorra che si era precedentemente trasferita).
Sulle navi passeggeri, invece, è importante mantenere la nave verticalmente dritta durante la navigazione, quando non si verificano i casi sopra riportati, per vari motivi: comfort dei passeggeri, piscine che potrebbero ‟trabordare”, ascensori che potrebbero non funzionare propriamente con la nave sbandata, eccetera. Pertanto uno degli ufficiali di guardia (solitamente il 3°Ufficiale assistente oppure l’Allievo), durante le accostate è incaricato di seguire il bilanciamento; pertanto è sempre pronto ad azionare il sistema del bilanciamento in anticipo e tenendo in considerazione forza e direzione del vento, ampiezza dell’accostata. Spesso durante l’accostata, in manovra, si sente dire, dal Comandante, ‟stiamo bilanciando?” . Quando la nave passeggeri è in porto, invece, il sistema di bilanciamento viene utilizzato molto poco, i comandi sono permanentemente sul ponte plancia, perché vi è sempre almeno un Ufficiale di guardia quando la nave è ormeggiata.